Star News












PWM kontroller püsimootoritele. Digitaalne PWM kommutaatori mootori kiiruse regulaator
Iga kaasaegne elektritööriist või kodumasin kasutab kommutaatormootorit. Selle põhjuseks on nende mitmekülgsus, st võime töötada nii vahelduv- kui alalispingel. Teine eelis on efektiivne käivitusmoment.
Kuid kollektori mootori suur kiirus ei sobi kõigile kasutajatele. Sujuvaks käivitamiseks ja kiiruse muutmise võimaluseks leiutati regulaator, mida on täiesti võimalik oma kätega teha.
Iga elektrimootor koosneb kommutaatorist, staatorist, rootorist ja harjadest. Selle tööpõhimõte on üsna lihtne:
Lisaks tavaseadmele on olemas ka:

Regulaatori seade
Selliste seadmete skeeme on maailmas palju. Sellest hoolimata võib need kõik jagada kahte rühma: standard- ja modifitseeritud tooted.
Standardne seade
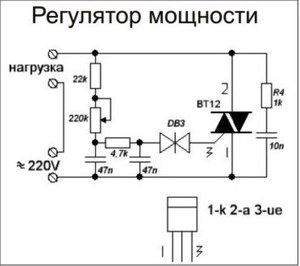
Tüüpilised tooted on kergesti valmistatavad idinistorid, hea töökindlus mootori pöörlemiskiiruse muutmisel. Reeglina põhinevad sellised mudelid türistori regulaatoritel. Selliste skeemide tööpõhimõte on üsna lihtne:

Seega reguleeritakse kollektori mootori kiirust. Enamasti kasutatakse sarnast skeemi ka välismaistes kodumajapidamises kasutatavates tolmuimejates. Siiski peaksite teadma, et sellisel kiirusregulaatoril pole tagasisidet. Seetõttu peate koormuse muutumisel reguleerima elektrimootori kiirust.
Muudetud skeemid
 Muidugi sobib tavaseade paljudele kiirusregulaatorite austajatele elektroonikasse “kaevuma”. Ilma edusammudeta ja toodete täiustamiseta elaksime aga ikkagi kiviajal. Seetõttu leiutatakse pidevalt huvitavamaid skeeme, mida paljud tootjad hea meelega kasutavad.
Muidugi sobib tavaseade paljudele kiirusregulaatorite austajatele elektroonikasse “kaevuma”. Ilma edusammudeta ja toodete täiustamiseta elaksime aga ikkagi kiviajal. Seetõttu leiutatakse pidevalt huvitavamaid skeeme, mida paljud tootjad hea meelega kasutavad.
Kõige sagedamini kasutatakse reostaatilisi ja integreeritud regulaatoreid. Nagu nimigi ütleb, põhineb esimene variant reostaadi vooluringil. Teisel juhul kasutatakse integreeritud taimerit.
Reostaadid on tõhusad kollektori mootori pöörete arvu muutmisel. Kõrge kasutegur on tingitud jõutransistoridest, mis võtavad osa pingest. Seega väheneb vooluvool ja mootor töötab väiksema innuga.
Video: kiiruse regulaatori seade koos toitehooldusega
Sellise skeemi peamine puudus on tekitatud suur soojushulk. Seetõttu tuleb tõrgeteta tööks regulaatorit pidevalt jahutada. Pealegi peaks seadme jahutamine olema intensiivne.
 Integreeritud regulaatoris rakendatakse teistsugust lähenemist, kus integreeritud taimer vastutab koormuse eest. Reeglina kasutatakse sellistes ahelates peaaegu igasuguse nimega transistore. See on tingitud asjaolust, et kompositsioon sisaldab mikrolülitust, millel on suured väljundvoolu väärtused.
Integreeritud regulaatoris rakendatakse teistsugust lähenemist, kus integreeritud taimer vastutab koormuse eest. Reeglina kasutatakse sellistes ahelates peaaegu igasuguse nimega transistore. See on tingitud asjaolust, et kompositsioon sisaldab mikrolülitust, millel on suured väljundvoolu väärtused.
Kui koormus on väiksem kui 0,1 amprit, läheb kogu pinge otse mikroskeemi, minnes transistoridest mööda. Regulaatori efektiivseks tööks on aga vajalik, et paisupinge oleks 12V. Seetõttu peavad elektriahel ja toiteallika enda pinge vastama sellele vahemikule.
Tüüpiliste vooluahelate ülevaade
 Väikese võimsusega elektrimootori võlli pöörlemist on võimalik reguleerida, ühendades puudumisega järjestikku võimsustakisti. Sellel valikul on aga väga madal efektiivsus ja võimetus kiirust sujuvalt muuta. Sellise ebameeldivuse vältimiseks peaksite kaaluma mitut kõige sagedamini kasutatavat regulaatori skeemi.
Väikese võimsusega elektrimootori võlli pöörlemist on võimalik reguleerida, ühendades puudumisega järjestikku võimsustakisti. Sellel valikul on aga väga madal efektiivsus ja võimetus kiirust sujuvalt muuta. Sellise ebameeldivuse vältimiseks peaksite kaaluma mitut kõige sagedamini kasutatavat regulaatori skeemi.
Nagu teate, on PWM-il konstantne impulsside amplituud. Lisaks on amplituud identne toitepingega. Seetõttu ei peatu elektrimootor isegi madalatel kiirustel sõites.
Teine võimalus sarnaneb esimesega. Ainus erinevus on see, et see kasutab operatsioonivõimendi. Selle komponendi sagedus on 500 Hz ja see tegeleb kolmnurkse kujuga impulsside arendamisega. Reguleerimine toimub ka muutuva takistiga.
Kuidas ise teha
 Kui te ei soovi valmis seadme ostmisele raha kulutada, saate selle ise valmistada. Nii saate mitte ainult säästa raha, vaid saada ka kasulikke kogemusi. Niisiis, türistori regulaatori valmistamiseks vajate:
Kui te ei soovi valmis seadme ostmisele raha kulutada, saate selle ise valmistada. Nii saate mitte ainult säästa raha, vaid saada ka kasulikke kogemusi. Niisiis, türistori regulaatori valmistamiseks vajate:
- jootekolb (jõudluse kontrollimiseks);
- juhtmed;
- türistor, kondensaatorid ja takistid;
- skeem.
Nagu diagrammil näha, juhib regulaator ainult 1 poolperioodi. Tavalise jootekolvi jõudluse testimiseks piisab sellest aga täiesti.
Kui teadmistest skeemi dekodeerimise kohta ei piisa, saate tutvuda tekstiversiooniga:

Regulaatorite kasutamine võimaldab elektrimootoreid säästlikumalt kasutada. Teatud olukordades saab sellist seadet valmistada iseseisvalt. Tõsisematel eesmärkidel (näiteks kütteseadmete juhtimine) on aga parem osta valmis mudel. Õnneks on selliseid tooteid turul lai valik ja hind on üsna soodne.
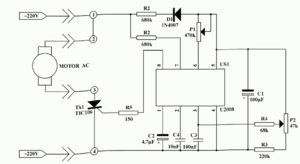
Võimsa triac BT138-600 põhjal saate kokku panna mootori pöörlemiskiiruse regulaatori ahela vahelduvvoolu. See ahel on ette nähtud puurmasinate, ventilaatorite, tolmuimejate, nurklihvijate jne elektrimootorite pöörlemiskiiruse juhtimiseks. Mootori kiirust saab reguleerida potentsiomeetri P1 takistuse muutmisega. Parameeter P1 määrab triaki avava päästikuimpulsi faasi. Ahel täidab ka stabiliseerimisfunktsiooni, mis säilitab mootori kiiruse ka siis, kui see on tugevalt koormatud.
Näiteks kui puurmasina mootor aeglustub suurenenud metallitakistuse tõttu, väheneb ka mootori EMF. See toob kaasa pinge tõusu ahelates R2-P1 ja C3, mis põhjustab triaki pikema avanemise ja kiiruse suurenemise vastavalt.

DC mootori regulaator
Lihtsaim ja populaarseim meetod alalisvoolumootori pöörlemiskiiruse reguleerimiseks põhineb impulsi laiuse modulatsioonil ( PWM
või PWM
). Sel juhul rakendatakse mootorile toitepinge impulsside kujul. Pulsi kordussagedus jääb konstantseks ja nende kestus võib muutuda – nii muutub kiirus (võimsus). 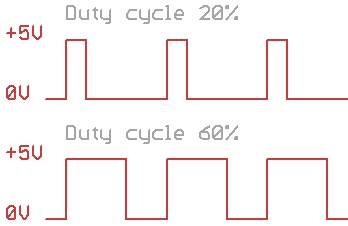
PWM-signaali genereerimiseks võite võtta NE555 kiibil põhineva vooluringi. Kõige lihtne vooluring Alalisvoolumootori kiiruse regulaator on näidatud joonisel:

Siin on VT1 n-tüüpi väljatransistor, mis on võimeline taluma mootori maksimaalset voolu antud pinge ja võlli koormusel. VCC1 on 5 kuni 16 V, VCC2 on suurem või võrdne VCC1-ga. PWM-signaali sagedust saab arvutada järgmise valemi abil:
F = 1,44/(R1*C1), [Hz]Kui R1 on oomides, siis C1 on faradides.
Ülaltoodud diagrammil näidatud reitingute korral on PWM-signaali sagedus võrdne:
F = 1,44/(50000*0,0000001) = 290 Hz.
Väärib märkimist, et isegi kaasaegsed seadmed, sealhulgas suure võimsusega juhtimine, põhinevad just sellistel skeemidel. Loomulikult kasutatakse võimsamaid elemente, mis taluvad suuri voolusid.
Elektrimootori kasutamisel tööriistades on üks suuremaid probleeme nende pöörlemiskiiruse reguleerimine. Kui kiirus ei ole piisavalt kiire, pole tööriista tegevus piisavalt tõhus.
Kui see on liiga kõrge, põhjustab see mitte ainult märkimisväärset elektrienergia raiskamist, vaid ka tööriista võimalikku läbipõlemist. Kui pöörlemiskiirus on liiga suur, võib tööriist muutuda vähem etteaimatavaks. Kuidas seda parandada? Selleks on tavaks kasutada spetsiaalset kiiruse regulaatorit.
Elektritööriistade ja kodumasinate mootor jaguneb tavaliselt ühte kahest põhitüübist:
- kollektori mootorid.
- asünkroonsed mootorid.
Varem oli teine neist kategooriatest kõige levinum. Praegu on ligikaudu 85% elektritööriistades, kodu- või köögiseadmetes kasutatavatest mootoritest kommutaatori tüüpi. Seda seletatakse asjaoluga, et neil on suurem kompaktsus, nad on võimsamad ja nende juhtimisprotsess on lihtsam.
Iga elektrimootori töö põhineb väga lihtsal põhimõttel: kui magneti pooluste vahele asetatakse ristkülikukujuline raam, mis võib pöörata ümber oma telje ja lasta mööda seda D.C., raam hakkab pöörlema. Pöörlemissuund määratakse "parema käe reegli" järgi.
Seda mustrit saab kasutada kollektormootori käitamiseks.
Oluline punkt on siin voolu ühendamine selle raamiga. Kuna see pöörleb, kasutatakse selleks spetsiaalseid libisevaid kontakte. Pärast raami 180 kraadi pöörlemist voolab nende kontaktide kaudu vool vastupidises suunas. Seega jääb pöörlemissuund samaks. Sel juhul sujuv pöörlemine ei toimi. Selle efekti saavutamiseks on tavaks kasutada mitukümmend kaadrit.
Seade

Kollektormootor koosneb tavaliselt rootorist (armatuurist), staatorist, harjadest ja tahhogeneraatorist:
- Rootor on pöörlev osa, staator on väline magnet.
- Grafiitpintslid- see on libisevate kontaktide põhiosa, mille kaudu antakse pöörlevale armatuurile pinge.
- Tahhogeneraator on seade, mis jälgib pöörlemise omadusi. Liikumise ühtluse rikkumise korral korrigeerib see mootorile antud pinget, muutes selle sujuvamaks.
- staator võib sisaldada rohkem kui ühte magnetit, aga näiteks 2 (2 paari poolusi). Samuti saab siin staatiliste magnetite asemel kasutada elektromagneti pooli. Selline mootor võib töötada nii alalis- kui ka vahelduvvoolust.
Kollektori mootori kiiruse reguleerimise lihtsuse määrab asjaolu, et pöörlemiskiirus sõltub otseselt rakendatud pinge suurusest.
Lisaks on oluline omadus see, et pöörlemistelje saab kinnitada otse pöörleva tööriista külge ilma vahepealseid mehhanisme kasutamata.
Kui me räägime nende klassifikatsioonist, siis võime rääkida:
- kollektormootorid alalisvool.
- kollektormootorid vahelduvvoolu.
Sel juhul räägime täpselt sellest, millise vooluga elektrimootorid toidavad.
Klassifikatsiooni saab teha ka mootori ergutamise põhimõtte järgi. Kollektormootori seadmes antakse elektritoide nii mootori rootorile kui ka staatorile (kui see kasutab elektromagneteid).
Erinevus seisneb selles, kuidas need ühendused on korraldatud.
Siin on tavaks eristada:
- paralleelne põnevus.
- Järjepidev erutus.
- Paralleeljada ergutus.
Kohandamine
Nüüd räägime sellest, kuidas saate kollektorimootorite kiirust reguleerida. Kuna mootori pöörlemiskiirus sõltub lihtsalt rakendatavast pingest, on kõik seda funktsiooni täitvad reguleerimisvahendid selleks üsna sobivad.
Siin on mõned näited sellistest valikutest:
- Laboratoorsed autotransformaatorid(LATR).
- Tehase reguleerimislauad kasutatakse kodumasinates (võite kasutada eelkõige segistites või tolmuimejates kasutatavaid).
- Nupud kasutatakse elektritööriistade projekteerimisel.
- Majapidamisregulaatorid sujuva tegevusega valgustus.
Kõigil ülaltoodud meetoditel on aga väga oluline viga. Koos kiiruse vähenemisega väheneb ka mootori võimsus. Mõnel juhul saab selle isegi käega peatada. Mõnel juhul võib see olla vastuvõetav, kuid enamasti on see suur takistus.
Hea võimalus on kiiruse reguleerimine tahhogeneraatori abil. Tavaliselt paigaldatakse see tehases. Mootori pöörlemissageduse kõrvalekallete korral kantakse mootorile juba korrigeeritud toiteallikas, mis vastab soovitud kiirusele. Kui mootori pöörlemise juhtseade on sellesse vooluringi sisse ehitatud, siis siin võimsuskadu ei esine.
Kuidas see konstruktiivselt välja näeb? Kõige tavalisem reostaadi pöörlemise reguleerimine, mis on tehtud pooljuhtide kasutamise alusel.
Esimesel juhul räägime mehaanilise reguleerimisega muutuvast takistusest. See on ühendatud järjestikku kollektori mootoriga. Puuduseks on täiendav soojuse teke ja aku kasutusea täiendav raiskamine. Selle reguleerimismeetodiga kaob mootori pöörlemisvõimsus. On odav lahendus. Nimetatud põhjustel ei kehti piisavalt võimsate mootorite puhul.
Teisel juhul pooljuhtide kasutamisel juhitakse mootorit teatud impulsside rakendamisega. Ahel võib muuta selliste impulsside kestust, mis omakorda muudab pöörlemiskiirust ilma võimsust kaotamata.
Kuidas teha oma kätega?
Olemas erinevaid valikuid reguleerimisskeemid. Vaatame ühte neist üksikasjalikumalt.
Siin on tema töö skeem:
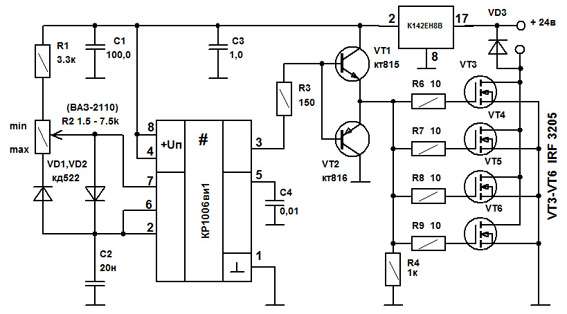
Algselt töötati see seade välja elektrisõidukite kommutaatori mootori reguleerimiseks. See oli umbes selline, kus toitepinge on 24 V, kuid see disain on rakendatav ka teistele mootoritele.
Ahela nõrk koht, mis selgus selle töö testimise käigus, on halb sobivus väga suurte voolude korral. Selle põhjuseks on ahela transistori elementide töö mõningane aeglustumine.
Soovitatav on, et vool ei oleks suurem kui 70 A. Selles vooluringis puudub voolu- ja temperatuurikaitse, mistõttu on soovitatav sisse ehitada ampermeeter ja jälgida voolu visuaalselt. Lülitussagedus on 5 kHz, selle määrab 20 nF kondensaator C2.
Voolutugevust muutes võib see sagedus muutuda vahemikus 3 kHz kuni 5 kHz. Voolu reguleerimiseks kasutatakse muutuvat takistit R2. Elektrimootori kasutamisel kodukeskkonnas on soovitatav kasutada standardset tüüpi regulaatorit.
Samal ajal on soovitatav valida R1 väärtus nii, et regulaatori töö oleks õigesti reguleeritud. Mikroskeemi väljundist juhitakse juhtimpulss transistoridel KT815 ja KT816 põhinevale push-pull võimendile, seejärel läheb see transistoridele.
Trükkplaadi mõõtmed on 50 x 50 mm ja see on valmistatud ühepoolsest klaaskiust:

Sellel diagrammil on lisaks näidatud 2 takistit 45 oomi. Seda tehakse selleks, et ühendada seadme jahutamiseks tavapärane arvuti ventilaator. Elektrimootori kasutamisel koormusena on vaja vooluahel blokeerida blokeeriva (snubber) dioodiga, mis oma omaduste järgi vastab kahekordsele koormusvoolu väärtusele ja kahekordsele toitepinge väärtusele.
Seadme kasutamine sellise dioodi puudumisel võib võimaliku ülekuumenemise tõttu kahjustada. Sel juhul tuleb diood asetada jahutusradiaatorile. Selleks võite kasutada metallplaati, mille pindala on 30 cm2.
Reguleerimisklahvid töötavad nii, et voolukadu on neil üsna väike. AT originaalskeem, kasutati tavalist arvuti ventilaatorit. Selle ühendamiseks kasutati piiravat takistust 100 oomi ja toitepinget 24 V.
Kokkupandud seade näeb välja selline:

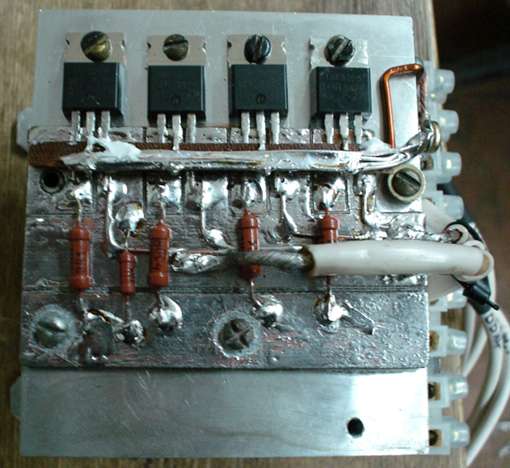
Toiteploki valmistamisel (alumisel joonisel) tuleb juhtmed ühendada nii, et nendes juhtides oleks minimaalselt painutusi, mida läbivad suured voolud Näeme, et sellise seadme valmistamine eeldab teatud erialaseid teadmisi ja oskused. Võib-olla on mõnel juhul mõttekas kasutada ostetud seadet.
Valikukriteeriumid ja maksumus
Kõige sobivama regulaatoritüübi õigeks valimiseks peab teil olema hea ettekujutus selliste seadmete sortidest:
- Erinevat tüüpi kontrollid. Võib olla vektor- või skalaarjuhtimissüsteem. Esimesi kasutatakse sagedamini, samas kui viimaseid peetakse usaldusväärsemaks.
- Regulaatori võimsus peaks vastama mootori maksimaalsele võimalikule võimsusele.
- Pinge järgi mugav on valida seade, millel on kõige mitmekülgsemad omadused.
- Sagedusomadused. Teile sobiv regulaator peaks sobima mootori kõrgeima sagedusega.
- Muud omadused. Siin räägime suurusest garantii periood, suurused ja muud omadused.
Sõltuvalt eesmärgist ja tarbijaomadustest võivad regulaatorite hinnad oluliselt erineda.
Enamasti jäävad need vahemikku umbes 3,5 tuhat rubla kuni 9 tuhat:
- Kiiruse regulaator KA-18 ESC mõeldud mudelitele mõõtkavas 1:10. See maksab 6890 rubla.
- Kiiruse regulaator MEGA kollektor (veekindel). See maksab 3605 rubla.
- Kiiruseregulaator LaTrax 1:18 mudelitele. Selle hind on 5690 rubla.
Kuidagi palus üks sõber mul oma “pennist” välja otsida ja parandada isetehtud pliidi elektrimootori kiiruse regulaatorit. Ta kiitis regulaatorit, et mootori pöördeid oli võimalik sujuvalt muuta, kuid selles läks midagi katki.
Regulaatori korpuse mõõtmed andsid mulle kohe märku, see oli valusalt kohmakas, lahti võtmisel nägin sees massiivset radiaatorit paari KT819 transistoriga, ikka metallkorpuses ja mingit vooluringi, mis on kokku pandud jala vastu jootmisega. juhtmed läksid muutuvtakistile ja toitetransistoridele. Jõutransistorid olid katki. Kuna mootor ei tarbinud vähe voolu, läksid jõutransistorid eriti madalatel pööretel päris kuumaks. Pidades sellist reguleerimisskeemi aegunuks, otsustasin kokku panna PWM (impulss-laiusmodulatsiooni) regulaatori, mille võtmeelemendiks on võimas väljatransistor. Tegeliku PWM-modulaatorina otsustati kasutada tuntud 555 taimerit. Näib, et mida saab teha enam kui 30 aastat tagasi välja töötatud mikroskeemiga. Sellegipoolest on taimeri 555 (meie analoog KR1006VI1) kasutusala praktiliselt piiramatu. Peamiste töörežiimide ja nende muudetud versioonide kasutamine võimaldab taimerit kasutada mitmesugustes seadmetes. On teada, et 555 ja 556 perekondade mikroskeemidele saab kokku panna järgmisi peamisi funktsionaalseid seadmeid:
- - monostabiilne generaator (ühe vibraator);
- - generaator - multivibraator;
- - viitegeneraator;
- - impulsi laiuse modulaator;
- - impulsi detektor;
- - sagedusjagaja.
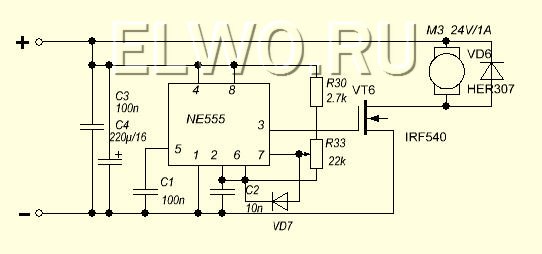
Mootori kiiruse regulaatori vooluahel osutus lihtsaks, minimaalse välise torustikuga:
Ma ei mürgitanud elektrimootori kiirusregulaatori trükkplaati, vaid lõikasin lõikuriga lihtsalt taimeri kontaktalad:

Jootsin taimeri ja panin kerekomplekti kokku.Võtmeelemendina kasutatakse võimsat n-kanalilist isoleeritud väravaga väljatransistorit, nn Power MOSFET IRF540.

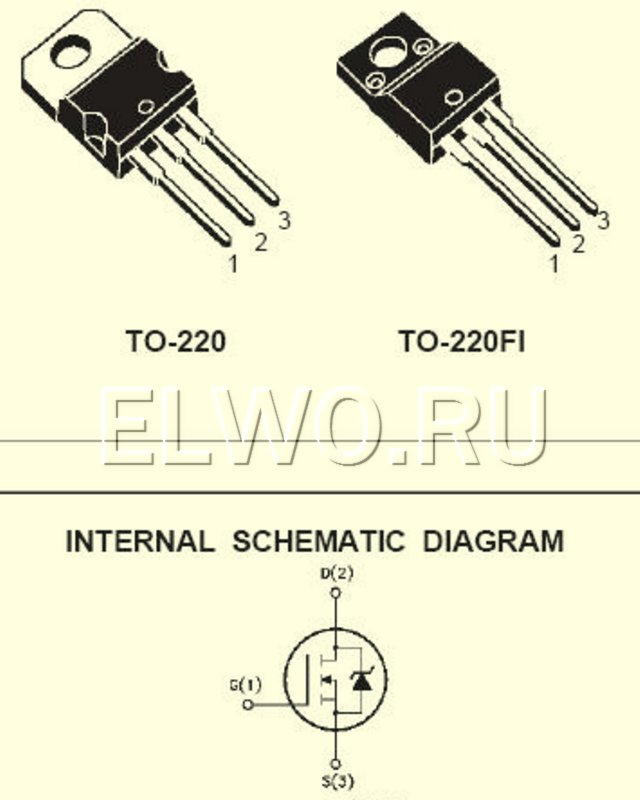
Kinnitasin väikese radiaatori külge - mõõdud valime elektrimootori töövoolu järgi. Kui see on väike, ei pruugi transistor üldse jahutada.
Mootori lähedale paigutatud kaitsediood. Kokkupandud seade asetati vanasse korpusesse, kuna selle jaoks oli autos juba kinnitus. Edaspidi on võimalik samasse korpusesse paigutada mõni muu autosse vajalik seade. Siin on selline "tuuning" osutus. Sinuga oli - Samodelkin.
Lihtsatele mehhanismidele on mugav paigaldada analoogvoolu regulaatorid. Näiteks võivad need muuta mootori võlli pöörlemiskiirust. Tehnilisest küljest on sellist regulaatorit lihtne teha (peate installima ühe transistori). Rakendatav robotite ja toiteallikate mootorite sõltumatu kiiruse reguleerimiseks. Kaks levinumat tüüpi regulaatorit on ühe kanaliga ja kahe kanaliga.
Video nr 1.Ühe kanaliga kontroller töös. Muudab mootori võlli pöörlemiskiirust, keerates muutuva takisti nuppu.
Video nr 2. Mootori võlli pöörlemiskiiruse suurendamine ühe kanaliga regulaatori töötamise ajal. Pöörete arvu suurenemine minimaalselt maksimaalsele väärtusele muutuva takisti nupu pööramisel.
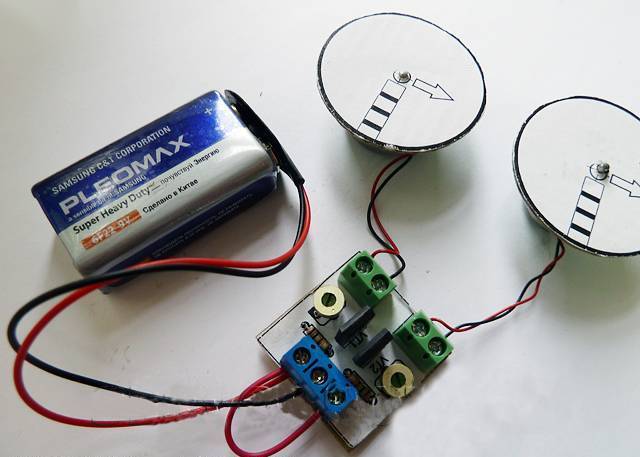
Video number 3. Kahe kanaliga kontroller töös. Mootori võllide pöörlemiskiiruse sõltumatu seadistamine häälestustakistite alusel.
Video number 4. Mõõdetud regulaatori väljundpinge digitaalne multimeeter. Saadud väärtus võrdub aku pingega, millest on lahutatud 0,6 volti (erinevus tekib transistori ristmiku pingelanguse tõttu). 9,55-voldise aku kasutamisel registreeritakse pinge muutus 0-8,9 volti.
Funktsioonid ja peamised omadused
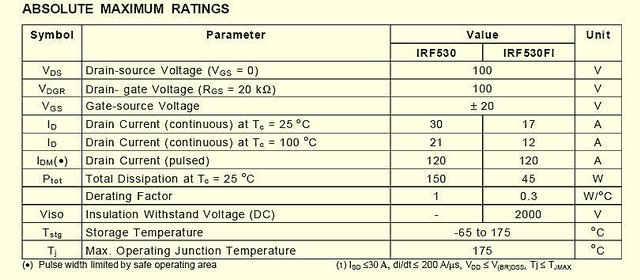
Ühe kanaliga (foto 1) ja kahe kanaliga (foto 2) regulaatorite koormusvool ei ületa 1,5 A. Seetõttu asendatakse kandevõime suurendamiseks transistor KT815A transistoriga KT972A. Nende transistoride viigude numeratsioon on sama (e-k-b). Kuid KT972A mudel töötab kuni 4A vooluga.
Ühe kanaliga mootori kontroller
Seade juhib ühte mootorit, mille toiteallikaks on pinge vahemikus 2–12 volti.
Seadme disain
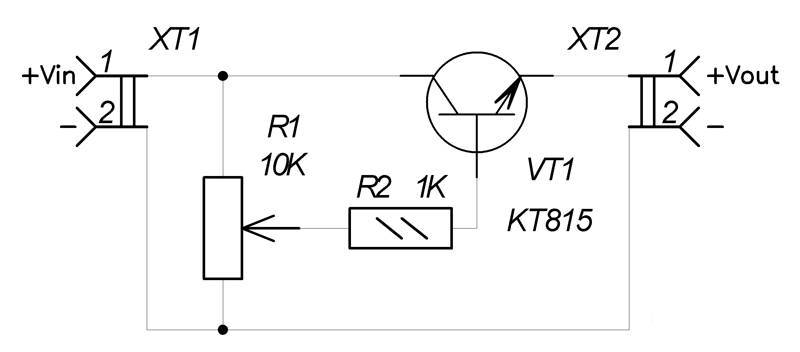
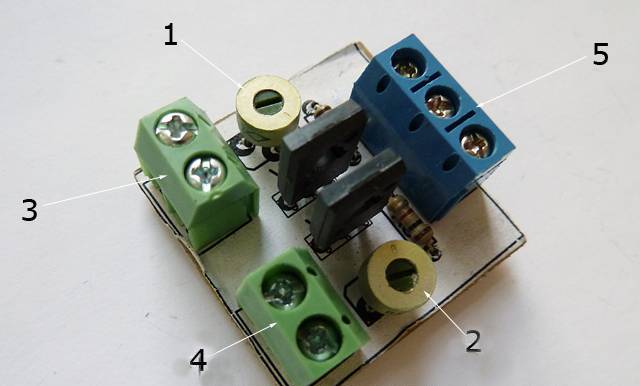
Regulaatori peamised disainielemendid on näidatud fotol. 3. Seade koosneb viiest komponendist: kahest muutuva takistusega takistist takistusega 10 kOhm (nr 1) ja 1 kOhm (nr 2), transistori mudelist KT815A (nr 3), paarist kaheosalisest kruvist. klemmliistud mootori (nr 4) ja aku sisendi (nr 5) ühendamiseks.
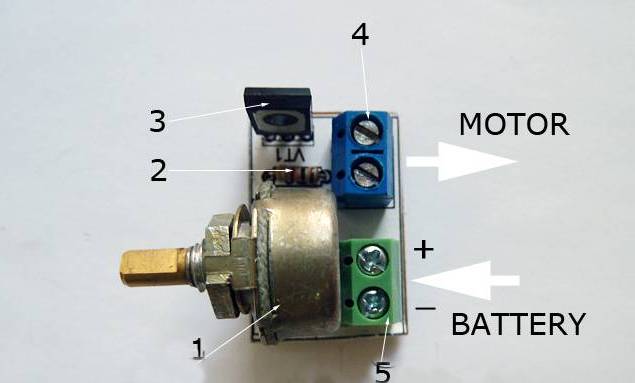
Märkus 1. Kruviklemmid pole vajalikud. Peenikese paigaldustraadi abil saate mootori ja toiteploki otse ühendada.
Toimimispõhimõte
Mootori kontrolleri tööprotseduuri kirjeldab ühendusskeem (joonis 1). Võttes arvesse polaarsust, on XT1 pistik kaasas pidev rõhk. Pistiku XT2 külge on ühendatud lambipirn või mootor. Sisendis lülitatakse sisse muutuv takisti R1, selle nupu pöörlemine muudab potentsiaali keskmises väljundis erinevalt aku miinusest. Läbi voolupiiraja R2 on keskmine väljund ühendatud transistori VT1 baasväljundiga. Sel juhul on transistor ühendatud tavalise vooluahela järgi. Positiivset potentsiaali baasväljundis suurendatakse keskmise väljundi liigutamisega muutuva takisti nupu sujuvalt pöörlemiselt ülespoole. Vool suureneb, mis on tingitud transistori VT1 kollektor-emitteri ristmiku takistuse vähenemisest. Potentsiaal väheneb, kui olukord on vastupidine.
Vooluskeem
Materjalid ja detailid
Vajalik on trükkplaat mõõtmetega 20x30 mm, mis on valmistatud ühelt poolt lamineeritud klaaskiudlehest (lubatav paksus 1-1,5 mm). Tabelis 1 on loetletud raadiokomponendid.

Märkus 2. Seadme jaoks vajalik muutuv takisti võib olla mis tahes tootmist, oluline on jälgida selle voolutakistuse väärtusi, mis on näidatud tabelis 1.
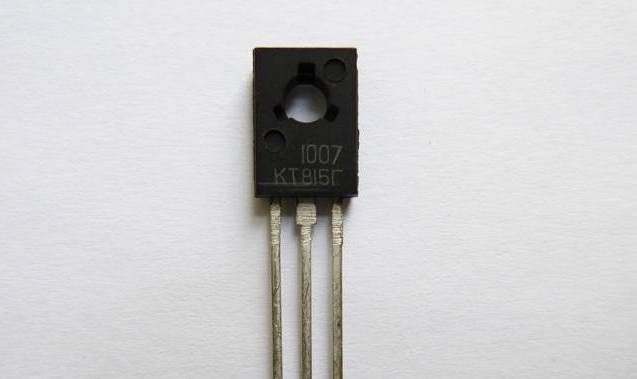
Märkus 3. Voolude reguleerimiseks üle 1,5A asendatakse KT815G transistor võimsama KT972A-ga (maksimaalse vooluga 4A). Sel juhul ei pea trükkplaadi mustrit muutma, kuna mõlema transistori kontaktide määramine on identne.
Montaažiprotsess
Edasiseks tööks peate alla laadima artikli lõpus asuva arhiivifaili, lahti pakkima ja printima. Regulaatori joonis trükitakse läikivale paberile (failile), paigaldusjoonis (fail) trükitakse valgele kontorilehele (A4 formaadis).
Järgmiseks liimitakse trükkplaadi joonis (fotol nr 1. 4) trükkplaadi vastasküljel olevatele voolu juhtivatele radadele (fotol nr 2. 4). Paigaldusjoonisel on vaja istmetesse teha augud (fotol nr 3. 14). Koostejoonis kinnitatakse kuivliimiga trükkplaadile, kusjuures augud peavad kokku sobima. Foto.5 näitab KT815 transistori pinout. 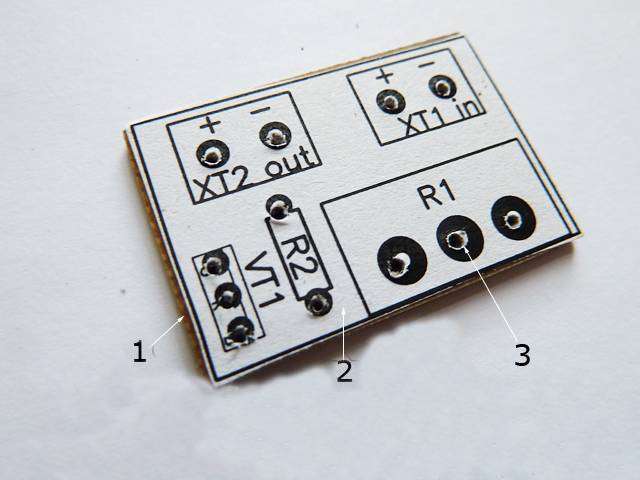
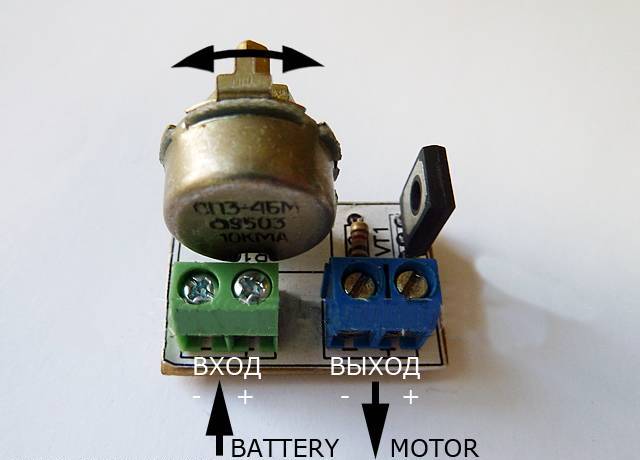
Klemmiplokkide-pesade sisend ja väljund on tähistatud valgega. Klambri kaudu on klemmliistuga ühendatud pingeallikas. Täielikult kokkupandud ühe kanaliga regulaator on näidatud fotol. Toiteallikas (9-voldine aku) ühendatakse kokkupaneku viimases etapis. Nüüd saate mootori abil reguleerida võlli pöörlemiskiirust, selleks peate muutuva takisti reguleerimisnuppu sujuvalt pöörama.

Seadme testimiseks tuleb arhiivist printida kettajoonis. Järgmisena peate selle joonise (nr 1) kleepima paksule ja õhukesele papppaberile (nr 2). Seejärel lõigatakse kääride abil välja ketas (nr 3).
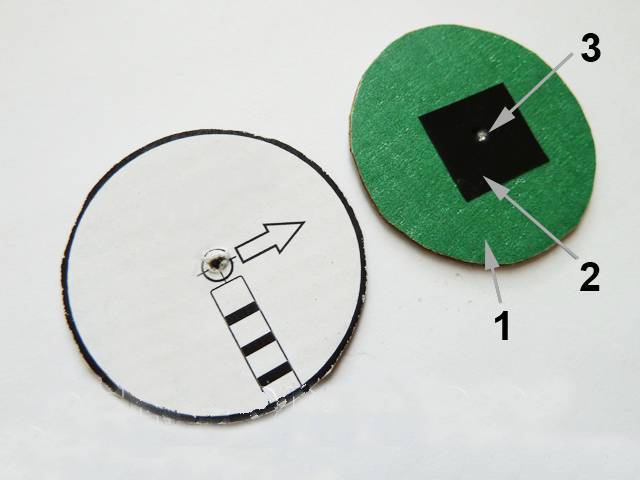
Saadud toorik pööratakse ümber (nr 1) ja keskele kinnitatakse musta elektrilindi ruut (nr 2), et mootori võlli pind kettaga paremini nakkuks. Peate tegema augu (nr 3), nagu pildil näidatud. Seejärel paigaldatakse ketas mootori võllile ja saab alustada katsetamist. Ühe kanaliga mootorikontroller on valmis!
Kahe kanaliga mootori kontroller
Kasutatakse samaaegselt paari mootoripaari iseseisvaks juhtimiseks. Toide saadakse pingest vahemikus 2 kuni 12 volti. Koormusvool on hinnatud kuni 1,5A kanali kohta.
- Seadme disain
Disaini põhikomponendid on näidatud fotol.10 ja nende hulka kuuluvad: kaks trimmerit 2. kanali (nr 1) ja 1. kanali (nr 2) reguleerimiseks, kolm kaheosalist kruviklemmi väljundit 2. mootorisse (nr 3), väljapääsuks 1. mootorisse (nr 4) ja sissepääsuks (nr 5).
Märkus.1 Kruviklemmide paigaldamine on valikuline. Peenikese paigaldustraadi abil saate mootori ja toiteploki otse ühendada.
Toimimispõhimõte
Kahe kanaliga kontrolleri vooluahel on identne ühe kanaliga kontrolleri elektriahelaga. Koosneb kahest osast (joon. 2). Peamine erinevus: muutuva takistuse takisti asendatakse häälestustakistiga. Võllide pöörlemiskiirus on eelnevalt seadistatud. 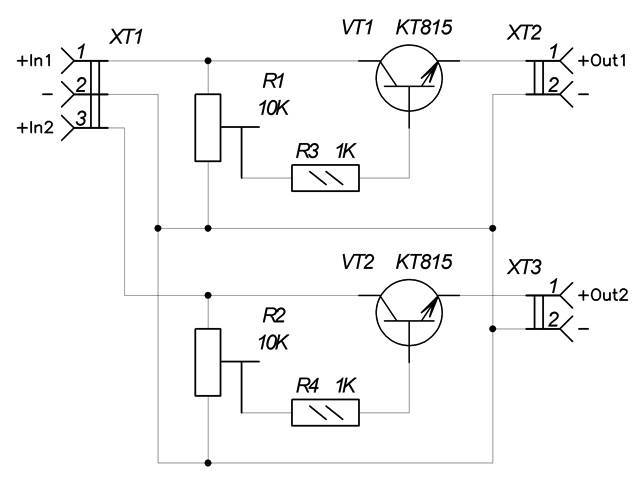
Märkus.2. Mootorite pöörlemiskiiruse kiireks reguleerimiseks asendatakse häälestustakistid muutuva takistusega takistitega kinnitusjuhtmega, mille takistusväärtused on diagrammil määratud.
Materjalid ja detailid
Vaja läheb 30x30 mm suurust trükkplaati, mis on valmistatud ühelt poolt lamineeritud klaaskiudlehest paksusega 1-1,5 mm. Tabelis 2 on loetletud raadiokomponendid.

Montaažiprotsess
Pärast artikli lõpus asuva arhiivifaili allalaadimist peate selle lahti pakkima ja printima. Läikivale paberile trükitakse termoülekande regulaatori joonis (fail termo2) ja valgele kontorilehele (A4 formaadis) paigaldusjoonis (fail montag2).
Trükkplaadi joonis on liimitud trükkplaadi vastasküljel olevate voolu juhtivate radade külge. Paigaldusjoonisele tehakse istmetesse augud. Koostejoonis kinnitatakse kuivliimiga trükkplaadile, kusjuures augud peavad kokku sobima. KT815 transistori pinout tehakse. Kontrollimiseks ühendage sisendid 1 ja 2 ajutiselt kinnitusjuhtmega.

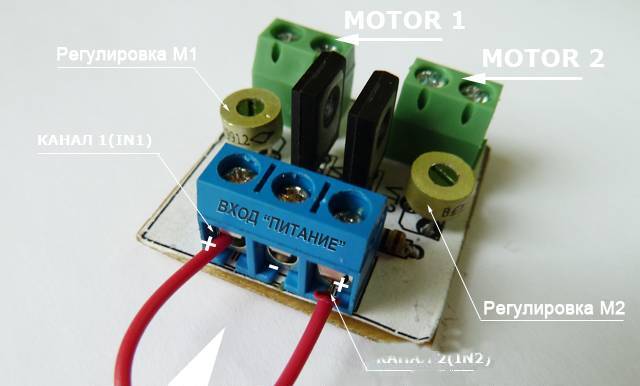
Kõik sisendid on ühendatud toiteallika poolusega (näites on 9-voldine aku). Toiteallika miinus on kinnitatud klemmiploki keskele. Oluline on meeles pidada: must juhe on “-” ja punane on “+”.
Mootorid peavad olema ühendatud kahe klemmiplokiga ning seadistada ka soovitud kiirus. Pärast edukaid katseid peate eemaldama sisendite ajutise ühenduse ja installima seadme robotimudelile. Kahe kanaliga mootorikontroller on valmis!
Esitatud tööks vajalikud skeemid ja joonised. Transistoride emitterid on tähistatud punaste nooltega.

