Star news












PWM regulator for permanent motors. Digital PWM brushed motor speed controller
Any modern power tool or household appliance uses a commutator motor. This is due to their versatility, i.e. the ability to operate on both alternating and direct voltage. Another advantage is the efficient starting torque.
However, the high speed of the commutator motor does not suit all users. For a smooth start and the ability to change the speed of rotation, a regulator was invented, which is quite possible to make with your own hands.
Each electric motor consists of a commutator, stator, rotor and brushes. The principle of its operation is quite simple:
In addition to the standard device, there are also:

Regulator device
There are many schemes of such devices in the world. Nevertheless, they can all be divided into 2 groups: standard and modified products.
Standard device
Typical products are distinguished by ease of manufacture of the idynistor and good reliability when changing engine speed. As a rule, such models are based on thyristor regulators. The operating principle of such schemes is quite simple:

Thus, the speed of the commutator motor is adjusted. In most cases, a similar scheme is used in foreign household vacuum cleaners. However, you should know that such a speed controller does not have feedback. Therefore, when the load changes, you will have to adjust the speed of the electric motor.
Changed schemes
 Of course, the standard device suits many fans of speed controllers to “dig” into the electronics. However, without progress and improvement of products, we would still be living in the Stone Age. Therefore, more interesting schemes are constantly being invented, which many manufacturers are happy to use.
Of course, the standard device suits many fans of speed controllers to “dig” into the electronics. However, without progress and improvement of products, we would still be living in the Stone Age. Therefore, more interesting schemes are constantly being invented, which many manufacturers are happy to use.
The most commonly used are rheostat and integral regulators. As the name implies, the first option is based on a rheostat circuit. In the second case, an integral timer is used.
Rheostatic ones are effective in changing the number of revolutions of the commutator motor. High efficiency is due to power transistors, which take part of the voltage. Thus, the current flow is reduced and the motor works with less effort.
Video: speed control device with power maintenance
The main disadvantage of this scheme is the large amount of heat generated. Therefore, for smooth operation, the regulator must be constantly cooled. Moreover, the cooling of the device must be intensive.
 A different approach is implemented in an integral regulator, where an integral timer is responsible for the load. As a rule, transistors of almost any type are used in such circuits. This is due to the fact that it contains a microcircuit with large output current values.
A different approach is implemented in an integral regulator, where an integral timer is responsible for the load. As a rule, transistors of almost any type are used in such circuits. This is due to the fact that it contains a microcircuit with large output current values.
If the load is less than 0.1 ampere, then all the voltage goes directly to the microcircuit, bypassing the transistors. However, for the regulator to operate effectively, it is necessary that there be a voltage of 12V at the gate. Therefore, the electrical circuit and the supply voltage itself must correspond to this range.
Overview of typical circuits
 You can regulate the rotation of the shaft of a low-power electric motor by connecting a power resistor in series with no. However, this option has very low efficiency and the inability to smoothly change speed. To avoid such a nuisance, you should consider several regulator circuits that are used most often.
You can regulate the rotation of the shaft of a low-power electric motor by connecting a power resistor in series with no. However, this option has very low efficiency and the inability to smoothly change speed. To avoid such a nuisance, you should consider several regulator circuits that are used most often.
As you know, PWM has a constant pulse amplitude. In addition, the amplitude is identical to the supply voltage. Consequently, the electric motor will not stop even when running at low speeds.
The second option is similar to the first. The only difference is that it is used as a master oscillator operational amplifier. This component has a frequency of 500 Hz and produces triangular-shaped pulses. Adjustment is also carried out using a variable resistor.
How to make it yourself
 If you don’t want to spend money on purchasing a ready-made device, you can make it yourself. This way, you can not only save money, but also gain useful experience. So, to make a thyristor regulator you will need:
If you don’t want to spend money on purchasing a ready-made device, you can make it yourself. This way, you can not only save money, but also gain useful experience. So, to make a thyristor regulator you will need:
- soldering iron (to check functionality);
- wires;
- thyristor, capacitors and resistors;
- scheme.
As can be seen from the diagram, the regulator controls only 1 half-cycle. However, for testing performance on a regular soldering iron, this will be quite enough.
If you don’t have enough knowledge to decipher the diagram, you can familiarize yourself with the text version:

The use of regulators allows for more economical use of electric motors. In certain situations, such a device can be made independently. However, for more serious purposes (for example, monitoring heating equipment), it is better to purchase a ready-made model. Fortunately, there is a wide selection of such products on the market, and the price is quite affordable.
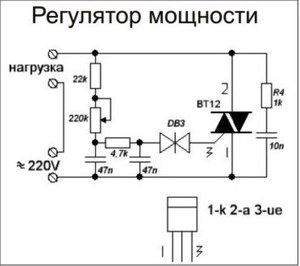
Based on the powerful triac BT138-600, you can assemble an engine speed controller circuit alternating current. This circuit is designed to regulate the rotation speed of electric motors of drilling machines, fans, vacuum cleaners, grinders, etc. The motor speed can be adjusted by changing the resistance of potentiometer P1. Parameter P1 determines the phase of the trigger pulse, which opens the triac. The circuit also performs a stabilization function, which maintains engine speed even under heavy load.
For example, when the motor of a drilling machine slows down due to increased metal resistance, the EMF of the motor also decreases. This leads to an increase in voltage in R2-P1 and C3 causing the triac to open for a longer time, and the speed increases accordingly.

Regulator for DC motor
The simplest and most popular method of adjusting the rotation speed of a DC motor is based on the use of pulse width modulation ( PWM
or PWM
). In this case, the supply voltage is supplied to the motor in the form of pulses. The repetition rate of the pulses remains constant, but their duration can change - so the speed (power) also changes. 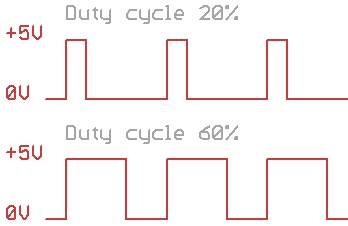
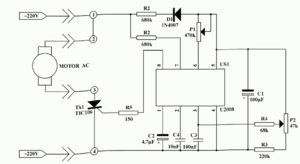
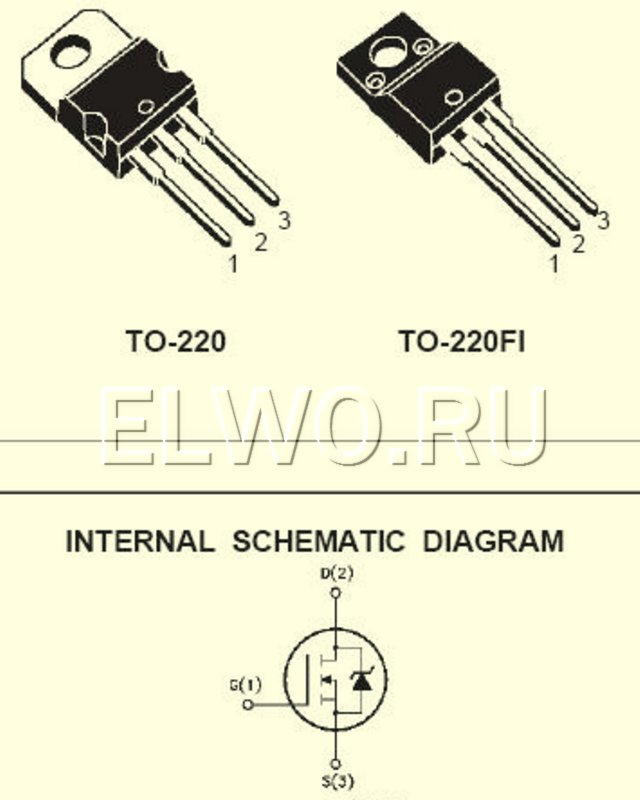
To generate a PWM signal, you can take a circuit based on the NE555 chip. The most simple circuit DC motor speed controller is shown in the figure:

Here VT1 is an n-type field-effect transistor capable of withstanding the maximum motor current at a given voltage and shaft load. VCC1 is from 5 to 16 V, VCC2 is greater than or equal to VCC1. The frequency of the PWM signal can be calculated using the formula:
F = 1.44/(R1*C1), [Hz]Where R1 is in ohms, C1 is in farads.
With the values indicated in the diagram above, the frequency of the PWM signal will be equal to:
F = 1.44/(50000*0.0000001) = 290 Hz.
It is worth noting that even modern devices, including those with high control power, are based on precisely such circuits. Naturally, using more powerful elements that can withstand high currents.
When using an electric motor in tools, one of the serious problems is adjusting the speed of their rotation. If the speed is not high enough, then the tool is not effective enough.
If it is too high, then this leads not only to a significant waste of electrical energy, but also to possible burnout of the tool. If the rotation speed is too high, the operation of the tool may also become less predictable. How to fix it? For this purpose, it is customary to use a special rotation speed controller.
The motor for power tools and household appliances is usually one of 2 main types:
- Commutator motors.
- Asynchronous motors.
In the past, the second of these categories was most widespread. Nowadays, approximately 85% of motors used in electric tools, household or kitchen appliances are of the commutator type. This is explained by the fact that they are more compact, they are more powerful and the process of managing them is simpler.
The operation of any electric motor is based on a very simple principle: if you place a rectangular frame between the poles of a magnet, which can rotate around its axis, and move it along it D.C., then the frame will rotate. The direction of rotation is determined according to the “right hand rule”.
This pattern can be used to operate a commutator motor.
The important point here is to connect the current to this frame. Since it rotates, special sliding contacts are used for this. After the frame rotates 180 degrees, the current through these contacts will flow in the opposite direction. Thus, the direction of rotation will remain the same. At the same time, smooth rotation will not work. To achieve this effect, it is customary to use several dozen frames.
Device

A commutator motor usually consists of a rotor (armature), stator, brushes and tachogenerator:
- Rotor- this is the rotating part, the stator is an external magnet.
- Brushes made of graphite- this is the main part of the sliding contacts, through which voltage is supplied to the rotating armature.
- Tachogenerator is a device that monitors rotation characteristics. In the event of a violation of the uniformity of movement, it adjusts the voltage supplied to the engine, thereby making it smoother.
- Stator may contain not one magnet, but, for example, 2 (2 pairs of poles). Also, instead of static magnets, electromagnet coils can be used here. Such a motor can operate on both direct and alternating current.
The ease of adjusting the speed of a commutator motor is determined by the fact that the rotation speed directly depends on the magnitude of the applied voltage.
In addition, an important feature is that the rotation axis can be directly attached to a rotating tool without the use of intermediate mechanisms.
If we talk about their classification, we can talk about:
- Brushed motors direct current.
- Brushed motors alternating current.
In this case, we are talking about what kind of current is used to power the electric motors.
Classification can also be made according to the principle of motor excitation. In a brushed motor design, electrical power is supplied to both the rotor and stator of the motor (if it uses electromagnets).
The difference lies in how these connections are organized.
Here it is customary to distinguish:
- Parallel excitation.
- Consistent excitation.
- Parallel-sequential excitation.
Adjustment
Now let's talk about how you can regulate the speed of commutator motors. Due to the fact that the rotation speed of the motor simply depends on the amount of voltage supplied, any means of adjustment that are capable of performing this function are quite suitable for this.
Let's list a few of these options as examples:
- Laboratory autotransformer(LATR).
- Factory adjustment boards, used in household appliances (you can use in particular those used in mixers or vacuum cleaners).
- Buttons, used in the design of power tools.
- Household regulators lighting with smooth action.
However, all of the above methods have a very important flaw. Along with the decrease in speed, the engine power also decreases. In some cases, it can be stopped even just with your hand. In some cases, this may be acceptable, but in most cases, it is a serious obstacle.
A good option is to adjust the speed using a tachogenerator. It is usually installed at the factory. If there are deviations in the motor rotation speed, an already adjusted power supply corresponding to the required rotation speed is transmitted to the motor. If you integrate motor rotation control into this circuit, then there will be no loss of power.
How does this look constructively? The most common are rheostatic rotation control, and those made using semiconductors.
In the first case, we are talking about variable resistance with mechanical adjustment. It is connected in series to the commutator motor. The disadvantage is the additional heat generation and additional waste of battery life. With this adjustment method, there is a loss of engine rotation power. Is a cheap solution. Not applicable for sufficiently powerful motors for the reasons mentioned.
In the second case, when using semiconductors, the motor is controlled by applying certain pulses. The circuit can change the duration of such pulses, which in turn changes the rotation speed without loss of power.
How to make it yourself?
Exist various options adjustment schemes. Let us present one of them in more detail.
Here is how it works:
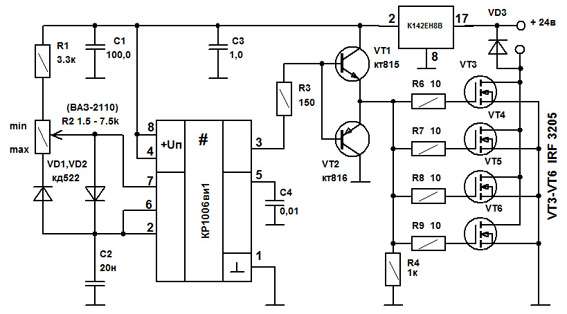
Initially, this device was developed to adjust the commutator motor in electric vehicles. We were talking about one where the supply voltage is 24 V, but this design is also applicable to other engines.
The weak point of the circuit, which was identified during testing of its operation, is its poor suitability at very high current values. This is due to some slowdown in the operation of the transistor elements of the circuit.
It is recommended that the current be no more than 70 A. There is no current or temperature protection in this circuit, so it is recommended to build in an ammeter and monitor the current visually. The switching frequency will be 5 kHz, it is determined by capacitor C2 with a capacity of 20 nf.
As the current changes, this frequency can change between 3 kHz and 5 kHz. Variable resistor R2 is used to regulate the current. When using an electric motor at home, it is recommended to use a standard type regulator.
At the same time, it is recommended to select the value of R1 in such a way as to correctly configure the operation of the regulator. From the output of the microcircuit, the control pulse goes to a push-pull amplifier using transistors KT815 and KT816, and then goes to the transistors.
The printed circuit board has a size of 50 by 50 mm and is made of single-sided fiberglass:

This diagram additionally shows 2 45 ohm resistors. This is done for the possible connection of a regular computer fan to cool the device. When using an electric motor as a load, it is necessary to block the circuit with a blocking (damper) diode, which in its characteristics corresponds to twice the load current and twice the supply voltage.
Operating the device in the absence of such a diode may lead to failure due to possible overheating. In this case, the diode will need to be placed on the heat sink. To do this, you can use a metal plate that has an area of 30 cm2.
Regulating switches work in such a way that the power losses on them are quite small. IN In the original design, a standard computer fan was used. To connect it, a limiting resistance of 100 Ohms and a supply voltage of 24 V were used.
The assembled device looks like this:

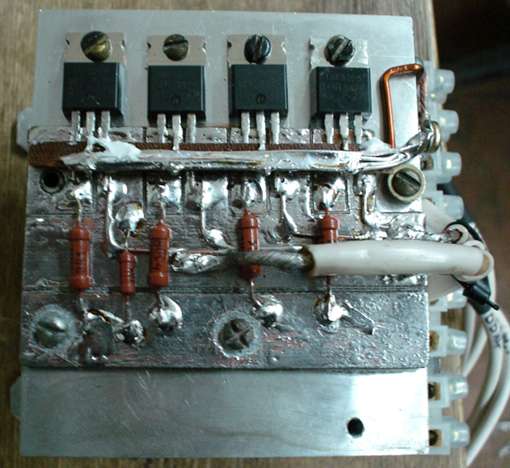
When manufacturing a power unit (in the lower figure), the wires must be connected in such a way that there is a minimum of bending of those conductors through which large currents pass. We see that the manufacture of such a device requires certain professional knowledge and skills. Perhaps in some cases it makes sense to use a purchased device.
Selection criteria and cost
In order to correctly choose the most suitable type of regulator, you need to have a good idea of what types of such devices there are:
- Various types of control. Can be a vector or scalar control system. The former are used more often, while the latter are considered more reliable.
- Regulator power must correspond to the maximum possible engine power.
- By voltage It is convenient to choose a device that has the most universal properties.
- Frequency characteristics. The regulator that suits you should match the highest frequency that the motor uses.
- Other characteristics. Here we are talking about the size warranty period, sizes and other characteristics.
Depending on the purpose and consumer properties, prices for regulators can vary significantly.
For the most part, they range from approximately 3.5 thousand rubles to 9 thousand:
- Speed controller KA-18 ESC, designed for 1:10 scale models. Costs 6890 rubles.
- MEGA speed controller collector (moisture-proof). Costs 3605 rubles.
- Speed controller for LaTrax 1:18 models. Its price is 5690 rubles.
An acquaintance once asked me to look at and repair a homemade speed controller for an electric stove motor from his “penny”. He praised the regulator because it was possible to smoothly change the engine speed, but something broke in it.
The dimensions of the regulator body immediately alerted me, it was too bulky, when I took it apart I saw inside a massive radiator with a couple of KT819 transistors, still in a metal case, and some kind of circuit assembled by soldering leg to leg from which wires went to a variable resistor and to power transistors. The power transistors turned out to be broken. Since the engine consumed quite a bit of current, the power transistors, especially at low speeds, got quite hot. Considering such an adjustment scheme to be outdated, I decided to assemble a PWM (pulse width modulation) regulator with a powerful field-effect transistor as a key element. As the actual PWM modulator, it was decided to use the well-known 555 timer. It would seem that what can be done on a microcircuit that was developed more than 30 years ago. However, the range of applications for the 555 timer (our analogue of the KR1006VI1) is almost limitless. The use of basic operating modes and their modified variants allows the timer to be used in a variety of devices. It is known that the following basic functional devices can be assembled on chips of the 555 and 556 families:
- - monostable generator (one-shot);
- - generator - multivibrator;
- - time delay generator;
- - pulse width modulator;
- - pulse detector;
- - frequency divider.
The circuit of the electric motor speed controller turned out to be simple, with a minimum of external wiring:
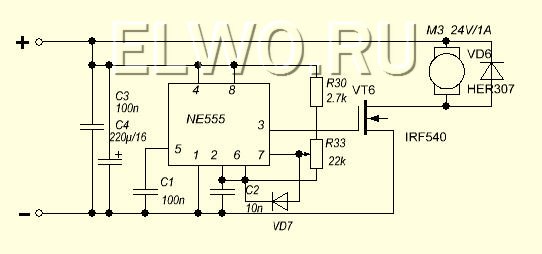
I didn’t etch the printed circuit board for the electric motor speed controller, I just cut through the contact areas for the timer with a cutter:

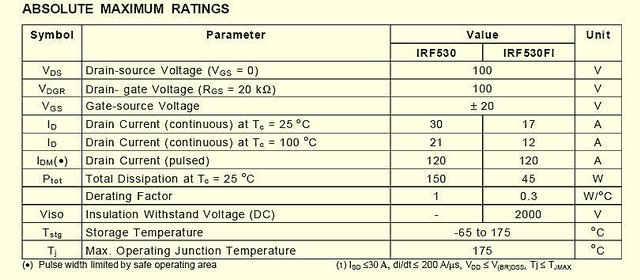
I soldered the timer and assembled the kit.A powerful n-channel field-effect transistor with an insulated gate, the so-called Power MOSFET IRF540, is used as a key element.

I attached it to a small radiator - we select the dimensions based on the operating current of the electric motor. If it is small, then the transistor may not need cooling at all.
The protective diode was placed near the engine. The assembled device was placed in an old case, since there was already a mount for it in the car. In the future, it will be possible to place some other necessary device in the car in the same housing. This is how the “tuning” turned out. Samodelkin was with you.
On simple mechanisms it is convenient to install analog current regulators. For example, they can change the speed of rotation of the motor shaft. From the technical side, implementing such a regulator is simple (you will need to install one transistor). Suitable for adjusting independent speed of motors in robotics and power supplies. The most common types of regulators are single-channel and two-channel.
Video No. 1. Single-channel regulator in operation. Changes the rotation speed of the motor shaft by rotating the variable resistor knob.
Video No. 2. Increasing the rotation speed of the motor shaft when operating a single-channel regulator. An increase in the number of revolutions from the minimum to the maximum value when rotating the variable resistor knob.
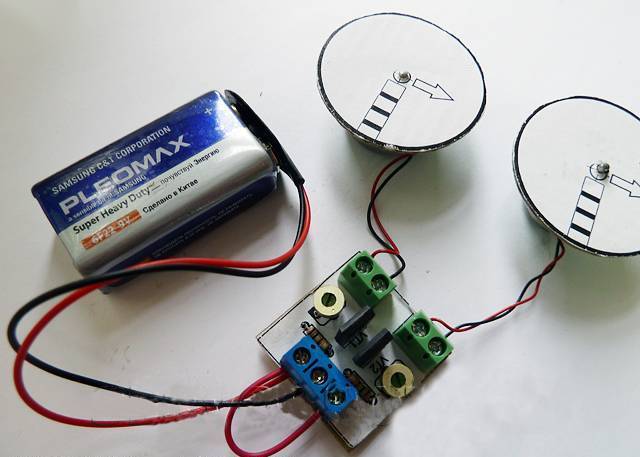
Video No. 3. Two-channel regulator in operation. Independent setting of the torsion speed of motor shafts based on trimming resistors.
Video No. 4. The voltage at the regulator output is measured digital multimeter. The resulting value is equal to the battery voltage, from which 0.6 volts have been subtracted (the difference arises due to the voltage drop across the transistor junction). When using a 9.55 volt battery, a change from 0 to 8.9 volts is recorded.
Functions and main characteristics
The load current of single-channel (photo 1) and two-channel (photo 2) regulators does not exceed 1.5 A. Therefore, to increase the load capacity, the KT815A transistor is replaced with KT972A. The numbering of the pins for these transistors is the same (e-k-b). But the KT972A model is operational with currents up to 4A.
Single channel motor controller
The device controls one motor, powered by voltage in the range from 2 to 12 volts.
Device design
The main design elements of the regulator are shown in the photo. 3. The device consists of five components: two variable resistance resistors with a resistance of 10 kOhm (No. 1) and 1 kOhm (No. 2), a transistor model KT815A (No. 3), a pair of two-section screw terminal blocks for the output for connecting a motor (No. 4) and input for connecting a battery (No. 5).
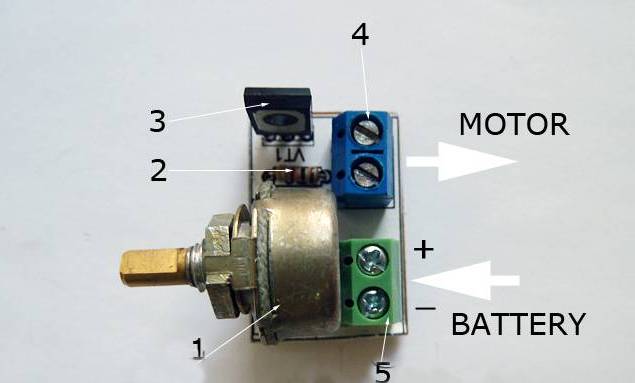
Note 1. Installation of screw terminal blocks is not necessary. Using a thin stranded mounting wire, you can connect the motor and power source directly.
Principle of operation
The operating procedure of the motor controller is described in the electrical diagram (Fig. 1). Taking into account the polarity, the XT1 connector is supplied constant pressure. The light bulb or motor is connected to the XT2 connector. A variable resistor R1 is turned on at the input; rotating its knob changes the potential at the middle output as opposed to the minus of the battery. Through current limiter R2, the middle output is connected to the base terminal of transistor VT1. In this case, the transistor is switched on according to a regular current circuit. The positive potential at the base output increases as the middle output moves upward from the smooth rotation of the variable resistor knob. There is an increase in current, which is due to a decrease in the resistance of the collector-emitter junction in transistor VT1. The potential will decrease if the situation is reversed.
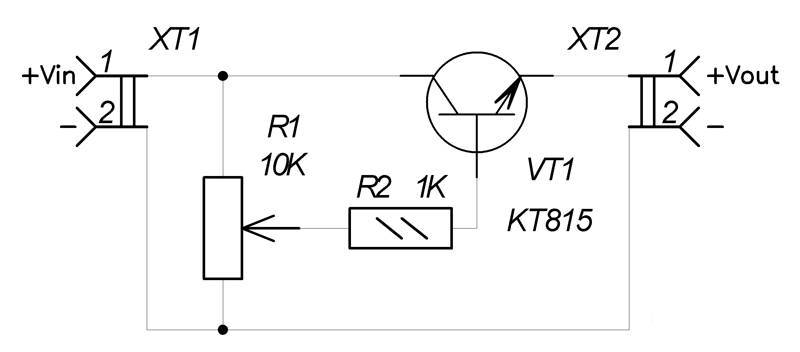
Electrical circuit diagram
Materials and details
A printed circuit board measuring 20x30 mm is required, made of a fiberglass sheet foiled on one side (permissible thickness 1-1.5 mm). Table 1 provides a list of radio components.

Note 2. The variable resistor required for the device can be of any manufacture; it is important to observe the current resistance values for it indicated in Table 1.
Note 3. To regulate currents above 1.5A, the KT815G transistor is replaced with a more powerful KT972A (with a maximum current of 4A). In this case, the printed circuit board design does not need to be changed, since the distribution of pins for both transistors is identical.
Build process
For further work, you need to download the archive file located at the end of the article, unzip it and print it. The regulator drawing (file) is printed on glossy paper, and the installation drawing (file) is printed on a white office sheet (A4 format).
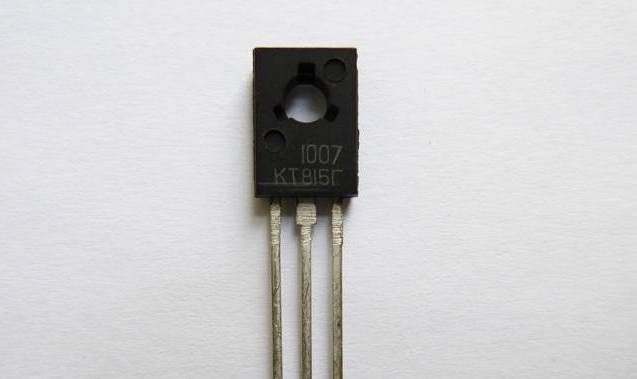
Next, the drawing of the circuit board (No. 1 in photo. 4) is glued to the current-carrying tracks on the opposite side of the printed circuit board (No. 2 in photo. 4). It is necessary to make holes (No. 3 in photo. 14) on the installation drawing in the mounting locations. The installation drawing is attached to the printed circuit board with dry glue, and the holes must match. Photo 5 shows the pinout of the KT815 transistor. 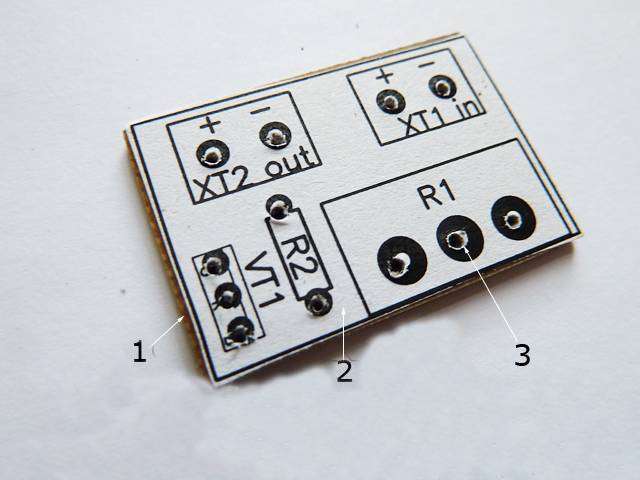
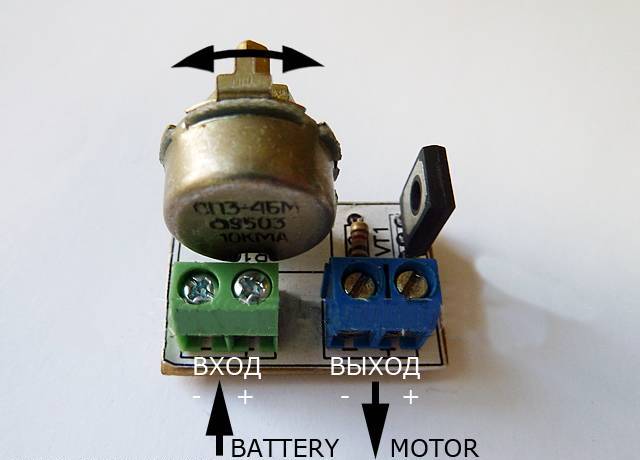
The input and output of terminal blocks-connectors are marked in white. A voltage source is connected to the terminal block via a clip. A fully assembled single-channel regulator is shown in the photo. The power source (9 volt battery) is connected at the final stage of assembly. Now you can adjust the shaft rotation speed using the motor; to do this, you need to smoothly rotate the variable resistor adjustment knob.

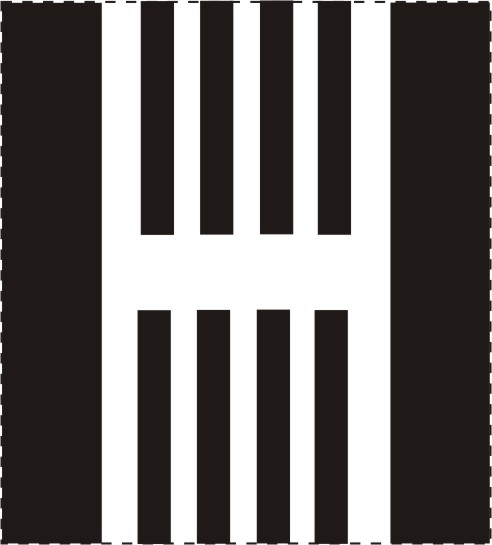
To test the device, you need to print a disk drawing from the archive. Next, you need to paste this drawing (No. 1) onto thick and thin cardboard paper (No. 2). Then, using scissors, a disc is cut out (No. 3).
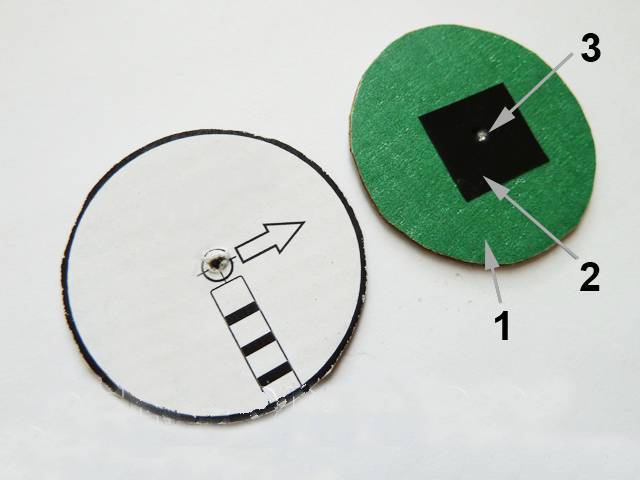
The resulting workpiece is turned over (No. 1) and a square of black electrical tape (No. 2) is attached to the center for better adhesion of the surface of the motor shaft to the disk. You need to make a hole (No. 3) as shown in the image. Then the disk is installed on the motor shaft and testing can begin. The single-channel motor controller is ready!
Two-channel motor controller
Used to independently control a pair of motors simultaneously. Power is supplied from a voltage ranging from 2 to 12 volts. The load current is rated up to 1.5A per channel.
- Device design
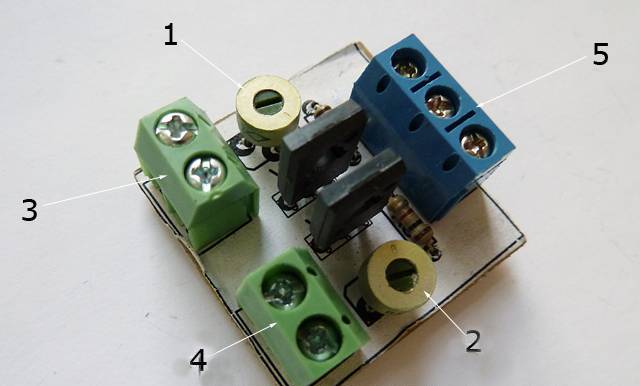
The main components of the design are shown in photo.10 and include: two trimming resistors for adjusting the 2nd channel (No. 1) and the 1st channel (No. 2), three two-section screw terminal blocks for output to the 2nd motor (No. 3), for output to the 1st motor (No. 4) and for input (No. 5).
Note:1 Installation of screw terminal blocks is optional. Using a thin stranded mounting wire, you can connect the motor and power source directly.
Principle of operation
The circuit of the two-channel regulator is identical electrical diagram single-channel regulator. Consists of two parts (Fig. 2). The main difference: the variable resistance resistor is replaced with a trimming resistor. The rotation speed of the shafts is set in advance. 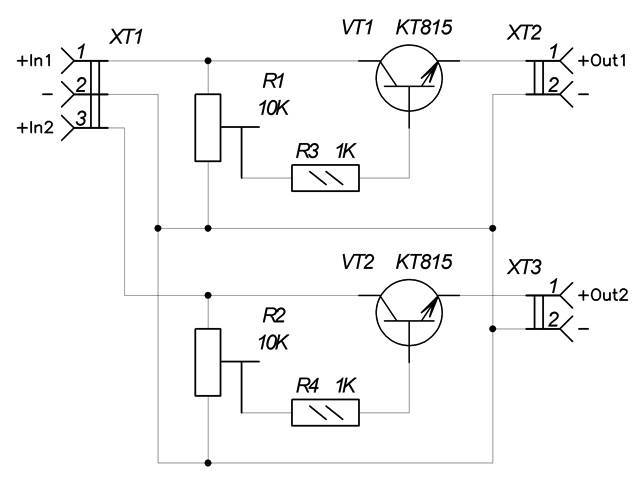
Note.2. To quickly adjust the rotation speed of the motors, the trimming resistors are replaced using a mounting wire with variable resistance resistors with the resistance values indicated in the diagram.
Materials and details
You will need a printed circuit board measuring 30x30 mm, made of a fiberglass sheet foiled on one side with a thickness of 1-1.5 mm. Table 2 provides a list of radio components.

Build process
After downloading the archive file located at the end of the article, you need to unzip it and print it. The regulator drawing for thermal transfer (termo2 file) is printed on glossy paper, and the installation drawing (montag2 file) is printed on a white office sheet (A4 format).
The circuit board drawing is glued to the current-carrying tracks on the opposite side of the printed circuit board. Form holes on the installation drawing in the mounting locations. The installation drawing is attached to the printed circuit board with dry glue, and the holes must match. The KT815 transistor is being pinned. To check, you need to temporarily connect inputs 1 and 2 with a mounting wire.

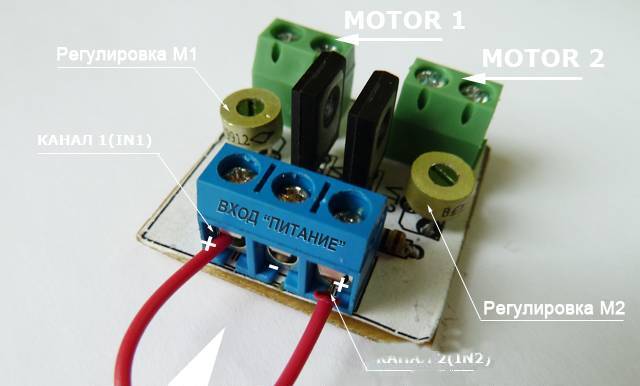
Any of the inputs is connected to the pole of the power source (a 9-volt battery is shown in the example). The negative of the power supply is attached to the center of the terminal block. It is important to remember: the black wire is “-” and the red wire is “+”.
The motors must be connected to two terminal blocks, and the desired speed must also be set. After successful testing, you need to remove the temporary connection of the inputs and install the device on the robot model. The two-channel motor controller is ready!
The necessary diagrams and drawings for the work are presented. The emitters of the transistors are marked with red arrows.

